{kind=link}
SatAOI: Delimitating Area of Interest for Swing-Arm Troweling Robot for Construction
2025 Proceedings of the 42nd ISARC, 2025
Recommended citation: Li, J.R., Zhou, S., Pan, P.*, Cai, R., Chen, G. (2025). SatAOI: Delimitating Area of Interest for Swing-Arm Troweling Robot for Construction. 2025 Proceedings of the 42nd ISARC, 389-396. Montreal, Canada. doi: 10.22260/ISARC2025/0052 http://doi.org/10.22260/ISARC2025/0052
Abstract
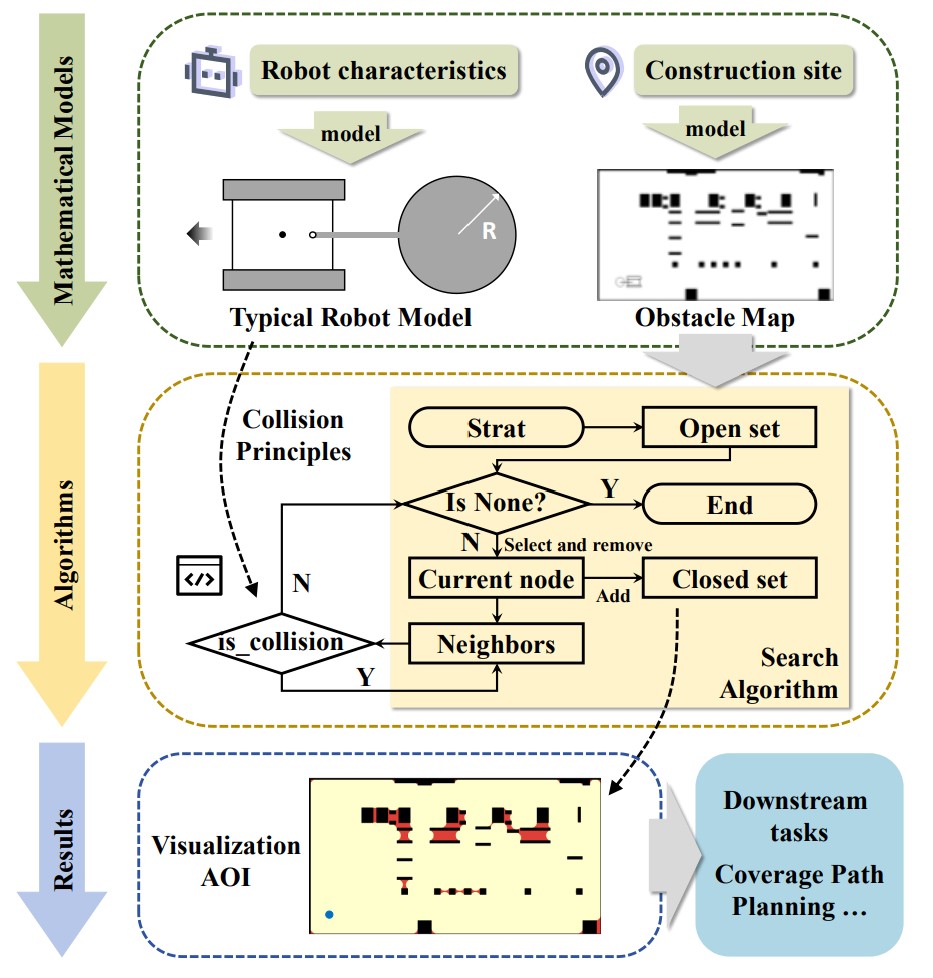
In concrete troweling for building construction, robots can significantly reduce workload and improve automation level. However, as a primary task of coverage path planning (CPP) for troweling, delimitating area of interest (AOI) in complex scenes is still challenging, especially for swing-arm robots with more complex working modes. Thus, this research proposes an algorithm to delimitate AOI for swing-arm troweling robot (SatAOI algorithm). By analyzing characteristics of the robot and obstacle maps, mathematical models and collision principles are established. On this basis, SatAOI algorithm achieves AOI delimitation by global search and collision detection. Experiments on different obstacle maps indicate that AOI can be effectively delimitated in scenes under different complexity, and the algorithm can fully consider the connectivity of obstacle maps. This research serves as a foundation for CPP algorithm and full process simulation of swing-arm troweling robots.
You could find watch the online presentation here.
This research was funded by the National Key R&D Program of China (grant No. 2023YFC3805800), the project “Research on Key Technologies for Mechanized Construction of Substation Civil Engineering” of “Technology project funding from State Grid Corporation of China” (project No. 5200-202311481A3-2-ZN) and the project “Constructing a theoretical system for sustainable development strategy of construction enterprises with digital platforms as the core” from China Construction Third Engineering Bureau Beijing Co., Ltd
Leave a Comment